

















- Stock: In Stock
- Model: SCJ009391
- SKU: SCJ009391
Ask a Question About This Product
- Description
Nema 23 Stepper Motor, 2 Phase, 3A, 1.5N·m
Brief
Description
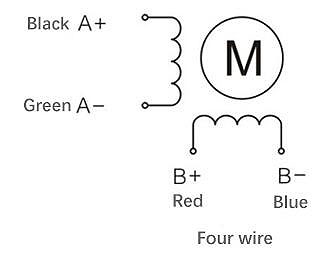
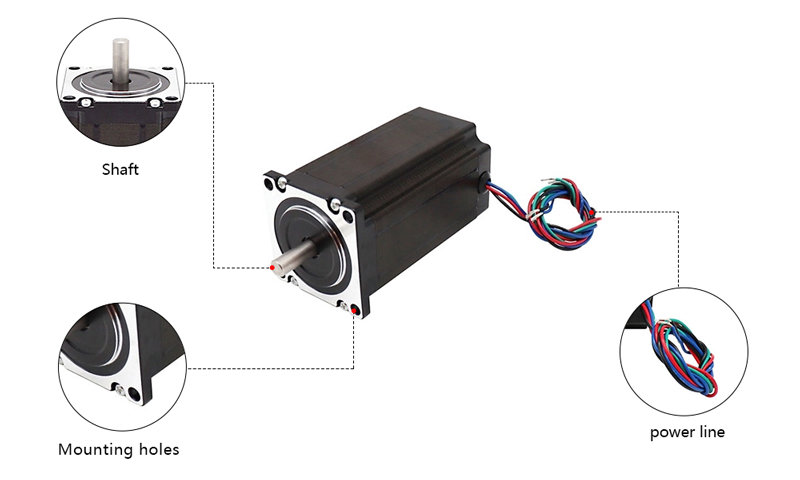
Nema 23 bipolar stepper motor is a four wire connection motor with encoder, wire colors of black, green, red and blue, holding torque at 1.5N·m, working at -20℃~+50℃, high torque and high precision. It is used in CNC machine, drawing equipment and sewing machine, robot arm, 3D printer and so on. This permanent magnet stepper motor can be controlled by a voltage of DC 24V ~ 50V or AC 20V ~ 40V digital stepper driver for precise position control.
Physical Specification
- Model Number: ATO-FY56EL300A
- Matched the Driver Model: ATO-FYDM504T
- Flanged Size: 57 x 57mm (Nema 23)
- Motor Length: 76mm
- Shaft Diameter: 8mm/ 6.35mm
- Number of Leads: 4 wire
- Weight: 1kg
Electrical Specification
- Motor Type: Bipolar Stepper
- Step Angle: 1.8°
- Rated Current: 3A
- Holding Torque: 1.5 N·m (150 N·cm, 212.5 Oz.in)
- Phase Resistance: 1Ω
- Phase Inductance: 3.5mH
- Rotor Inertia: 460g·cm2
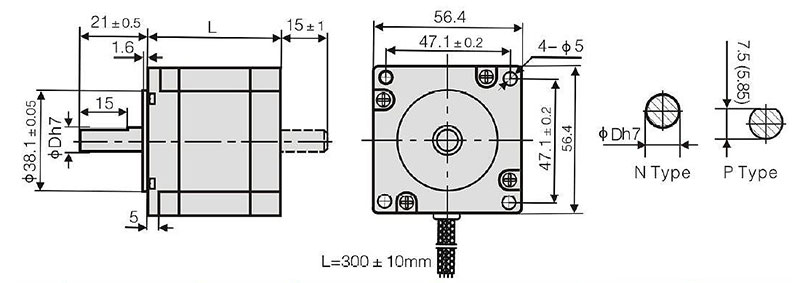
Dimensions (Unit: mm)
L=76mm
Wiring Diagram
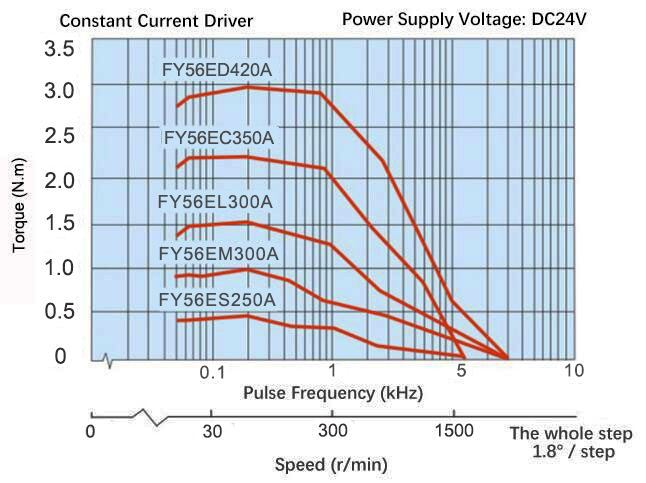
Speed-Torque Curve Diagram
Details
Tips: Stepper motor lost and out of step
Electric motor misalignment means out of step, and out of step is divided into lost step and overstep. When the stepper motor is working normally, it moves a step angle every time it receives a control pulse, that is, one step forward. If the control pulse is continuously input, the motor will continuously rotate accordingly. When the motor loses steps, the number of steps the rotor advances is less than the number of pulses; when the motor generates oversteps, the number of steps the rotor advances will be significantly more than the number of pulses.
If the stepper motor is improperly selected, the motor torque is not enough or the inertia of the object movement exceeds the motor's self-locking force, it will cause loss step or out of step. Or the driver selection is improper, and the matching driver current is too small, which affects the normal operation of the motor. The rated current of the stepper motor driver should be greater than 1.2 to 1.5 times the rated current of the motor.









