










Nema 23 2-phase Stepper Motor, 2A, 1.8 degree, 6 wires
from
$65.46
Ex Tax: $65.46
- Stock: In Stock
- Model: SCJ009403
- SKU: SCJ009403
Products Sold: 0
Product Views: 720
Ask a Question About This Product
- Description
Nema 23 2-phase Stepper Motor, 2A, 1.8 degree, 6 wires
Brief
Low cost and high quality stepper motor, 2A, 1.35Nm holding torque, 1.8 deg. step angle(200 steps/rev), size in Nema 23, brand new and manufacturer direct sale.
Description
Nema 23 Stepper motor, 1.35Nm in 76mm, 1.8 degree, 2 phase 6 wires.
Specification
| Electrical Specification | Model | SOCOJE57STH76-2006 |
| Matched Driver Model | SCJ009403(Click it to see more info) | |
| Step Angle | 1.8° | |
| Holding Torque | 1.35Nm | |
| Rated Current/phase | 2A | |
| Phase Resistance | 2.25Ω | |
| Inductance | 3.6mH | |
| Rotor Inertia | 440g-cm2 | |
| Physical Specification | Frame Size | 57 x 57mm |
| Length | 76mm | |
| Shaft Diameter | Φ6.35mm | |
| Shaft Length | 19mm | |
| Motor Leads | 6 | |
| Weight | 1.1kg | |
| Technical Parameters | Step Angle Accuracy | ±5% (full step, no load) |
| Resistance Accuracy | ±10% | |
| Inductance Accuracy | ±20% | |
| Temperature Rise | 80℃ Max. (rated current, 2 phase on) | |
| Ambient Temperature | -20℃~+50℃ | |
| Insulation Resistance | 100MΩ Min. 500VDC | |
| Dielectric Strength | 500V AC for one minute | |
| Shaft Radial Play | 0.02Max. 450g | |
| Shaft Axial Play | 0.08Max. 450g | |
| Quality Assurance | Warranty Period | 12 months |
| Certificate | CE, ROHs, ISO/SGS9001 |
Nema 23 Stepper Motor Dimensions: (Unit=mm)
 L Max=76mm
L Max=76mm
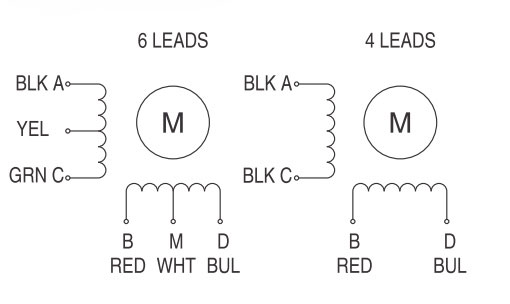
Nema 23 Stepper Motor Wiring Diagram
Tips: Advantages and disadvantages of stepper motor
A. Advantages
- The rotational angle of motor is in direct proportion to number of pulses.
- The torque is the largest when the motor stops rotating (when winding is excited).
- As the precision of each step is 3% to 5% and the error at one step will not be accumulated to the next one, so there is good position accuracy and repeatability of motion.
- Excellent start and stop and inversion response.
- Without electric brush, the reliability is high. Therefore, the service life of motor only depends on that of bearing.
- The response of motor is determined by the digital input pulse, so open-loop control can be adopted. As a result, the structure of the motor can be simple and the cost can be controlled.
- Synchronous rotation at extremely low velocity by only directly connecting the load to the spindle of motor.
- For the velocity is in direct proportion to the pulse frequency, there is wide range of rotational velocity.
B. Disadvantages
- If not controlled properly, the resonance can be easily caused.
- Hard to rotate at high rotational velocity.
- Hard to obtain large torque.
- No advantage over volume and weight and low utilization ratio of energy resources.




