

















- Stock: In Stock
- Model: SCJ009356
- SKU: SCJ009356
Ask a Question About This Product
- Description
Nema 34 Stepper Motor, 2 Phase, 3.5A, 4.5N·m
Brief
Description
NEMA 34 2 phase stepper motor is a hybrid stepper motor that has the best attributes of the variable reluctance stepper motor and a permanent magnet stepper motor. The bipolar stepper motor is 1.8 degrees per step with 14mm or 12.7mm shaft performed well in various applications.
Physical Specification
- Model Number: SOCOJE-FY86ES350A
- Matched the Driver Model: SOCOJE-FYDM808T
- Flanged Size: 86 x 86mm (Nema 34)
- Motor Length: 80mm
- Shaft Diameter: 14mm/ 12.7mm
- Number of Leads: 4 wire
- Weight: 2kg
Electrical Specification
- Motor Type: Bipolar Stepper
- Step Angle: 1.8°
- Rated Current: 3.5A
- Holding Torque: 4.5 N·m (450 N·cm, 637 Oz.in)
- Phase Resistance: 1Ω
- Phase Inductance: 4.4mH
- Rotor Inertia: 1500g·cm2
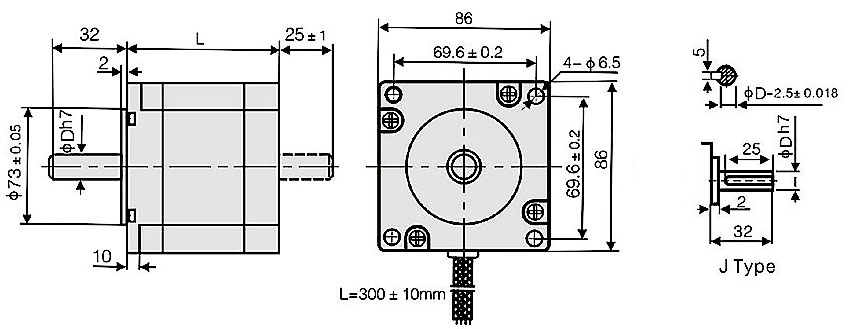
Dimensions (Unit: mm)
L=80mm
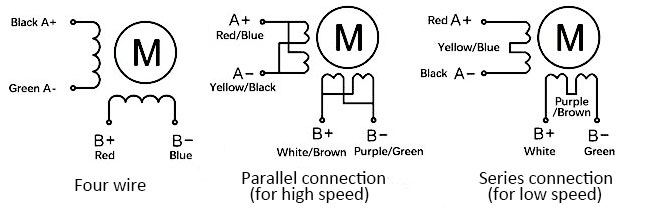
Wiring Diagram
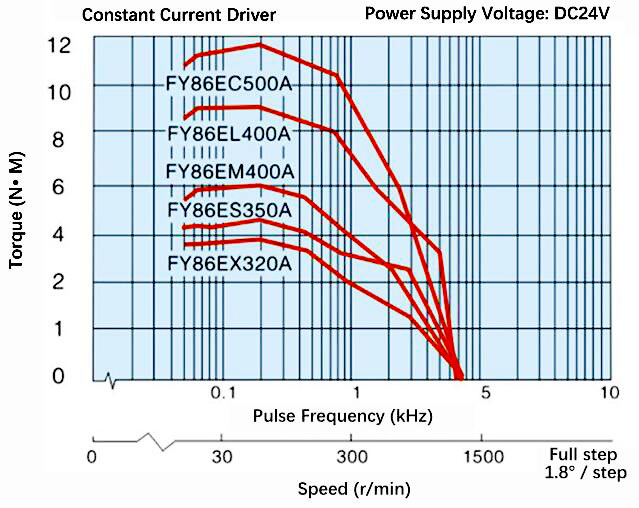
Speed-Torque Curve Diagram
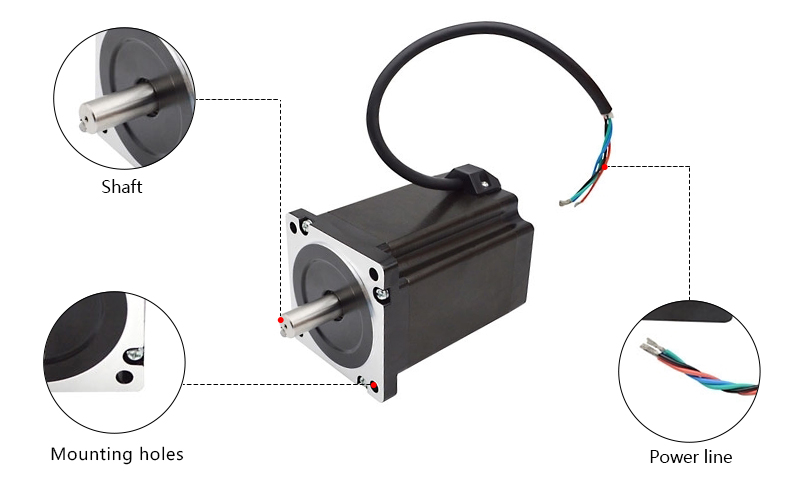
Details
Tips: What is a stepper motor drive module?
The stepper motor is driven by the drive module. The stepper motor is driven by pulse current, and it rotates at a fixed angle. Its operation needs to be driven by an electronic device. This device is a motor driver. It converts the pulse signal sent by the control system into the angular displacement of the stepping motor, or in other words, every time the control system sends a pulse signal, it passes through the driver. Applying a pulse voltage to the stepper motor makes the stepper motor rotate by a step angle. So the speed of the stepper motor is proportional to the frequency of the pulse signal.
When the stepper motor driver receives a pulse signal, it drives the stepper motor to rotate a fixed angle in the set direction (called "step angle"), and its rotation runs step by step at a fixed angle. The angular displacement can be controlled by controlling the number of pulses, so as to achieve the purpose of accurate positioning. At the same time, the speed and acceleration of the motor rotation can be controlled by controlling the pulse frequency, so as to achieve the purpose of speed regulation.









