










Nema 34 Bipolar Stepper motor, 1.8 degree, 4 wires, 4.5A
from
$132.77
Ex Tax: $132.77
- Stock: In Stock
- Model: SCJ009369
- SKU: SCJ009369
Products Sold: 0
Product Views: 706
Ask a Question About This Product
- Description
Nema 34 Bipolar Stepper motor, 1.8 degree, 4 wires, 4.5A
Brief
This bipolar Nema 34 stepper motor is most popular, it with 1.8 deg. step angle (200 steps/revolution).
Each phase draws 4.5A, allowing for a holding torque of 6.5Nm.
Description
Nema 34 bipolar stepper motor, 4.5A, 2 phase 4 wires, which has 1.8 deg. step angle (200 steps/revolution), brand new and direct sale by manufacturer.
Specifications
| Basics | Model | SOCOJE2100-4504A |
| Matched the Driver Model | SCJ009369 (Click it to see more info) | |
| Step Angle | 1.8° | |
| Length | 100mm | |
| Weight | 3kg | |
| Current | 4.5A | |
| Resistance | 0.8Ω | |
| Holding Torque | 6.5Nm | |
| Motor Leads | 4 | |
| Rotor Inertia | 2500g-cm2 | |
| Technical parameters | Step Angle Accuracy | ±5% (full step, no load) |
| Resistance Accuracy | ±10% | |
| Inductance Accuracy | ±20% | |
| Temperature Rise | 80℃Max. (rated current, 2 phase on) | |
| Ambient Temperature | -10℃~+50℃ | |
| Insulation Resistance | 100MΩ Min. 500VDC | |
| Dielectric Strength | 1Min. 500VAC·5mA | |
| Shaft Radial Play | 0.06Max. 450g | |
| Shaft Axial Play | 0.08Max. 450g |
Dimension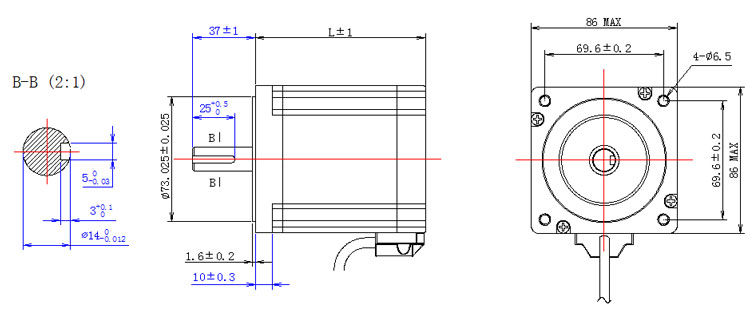
Motor Connection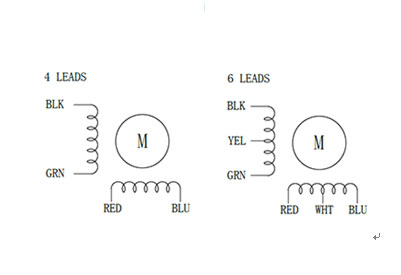
Tips: Methods for judging the angular precision of the stepper motor
The static torque characteristic of the stepper motor is the most important. As for the angular precision of the stepper motor can, It can be directly connected through coupler (no occurrence of the phenomenon of rotation and displacement) with encoder of high resolution ratio. The angle is read into the counter as the figure and calculated with computer. Meanwhile, the result is output through printer or X-Y mapper as the evaluation material of the motor.
- Positional accuracy: by taking any point of rotor as the starting point, measure once every step. Once the motor rotates for a circle continuously, the difference between actual position and theoretical one of the rotor can be solved. The error can be represented with the range of positive maximum value and negative one, called position error, which can be represented with the percentage (%) of basic stepping angle.
- Stepping angular accuracy: by taking any point of rotor as the starting point, the difference in actually measured and theoretical stepped angles can be solved when the motor rotates continuously, which can be represented with the percentage (%) of theoretical stepping angle, called stepping angular accuracy, represented by the maximum value of (+) and (-) sides in the circle 1.
- Hysteresis error: After the rotor rotates positively for one circle from any point and then returns to the original point by reversely rotating for one circle, the maximum value of deviation angle of each measuring position can be taken, called hysteresis error.




